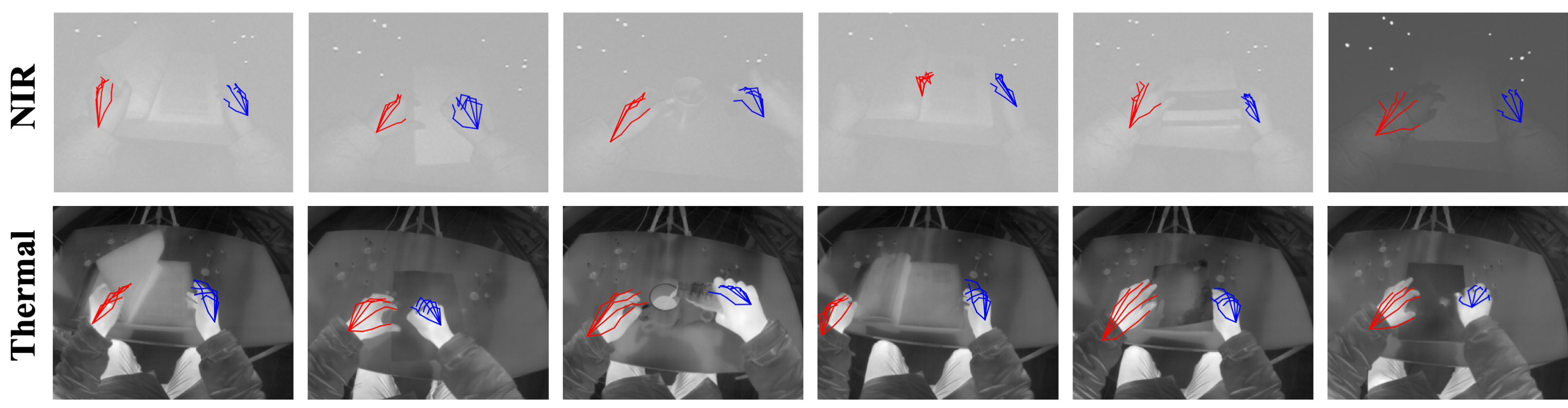
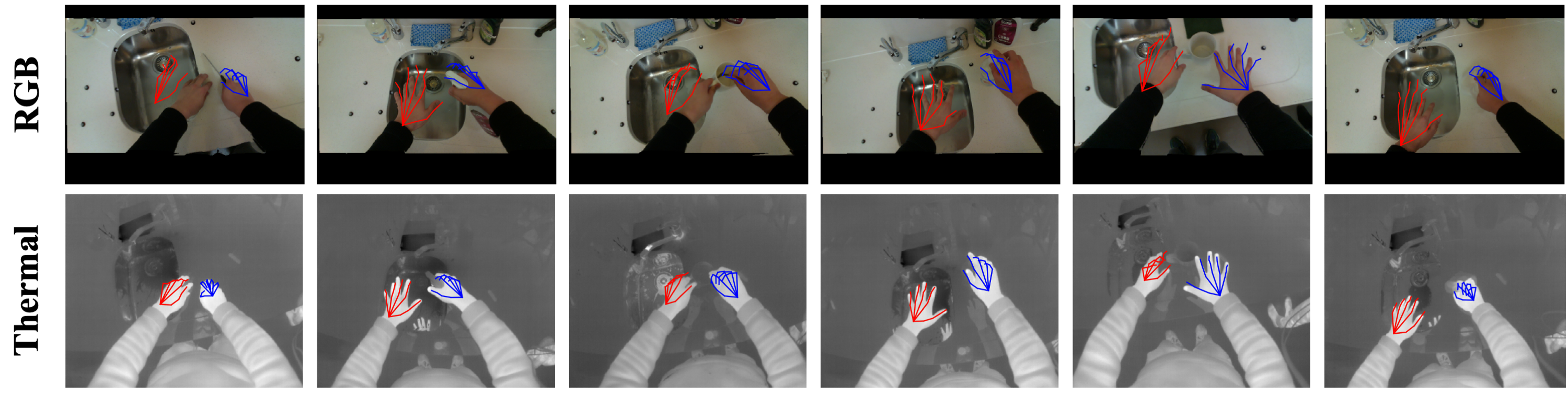
Designing egocentric 3D hand pose estimation systems that can perform reliably in complex,
real-world scenarios is crucial for downstream applications. Previous approaches using RGB
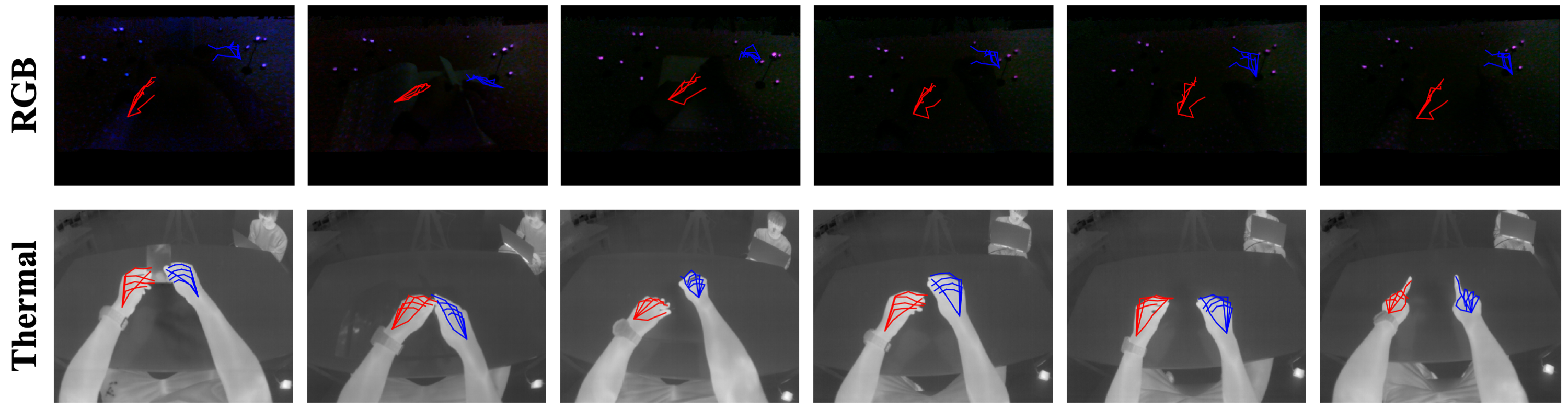
or NIR imagery struggle in challenging conditions: RGB methods are susceptible to lighting
variations and obstructions like handwear, while NIR techniques can be disrupted by sunlight
or interference from other NIR-equipped devices. To address these limitations, we present ThermoHands,
the first benchmark focused on thermal image-based egocentric 3D hand pose estimation,
demonstrating the potential of thermal imaging to achieve robust performance under these conditions.
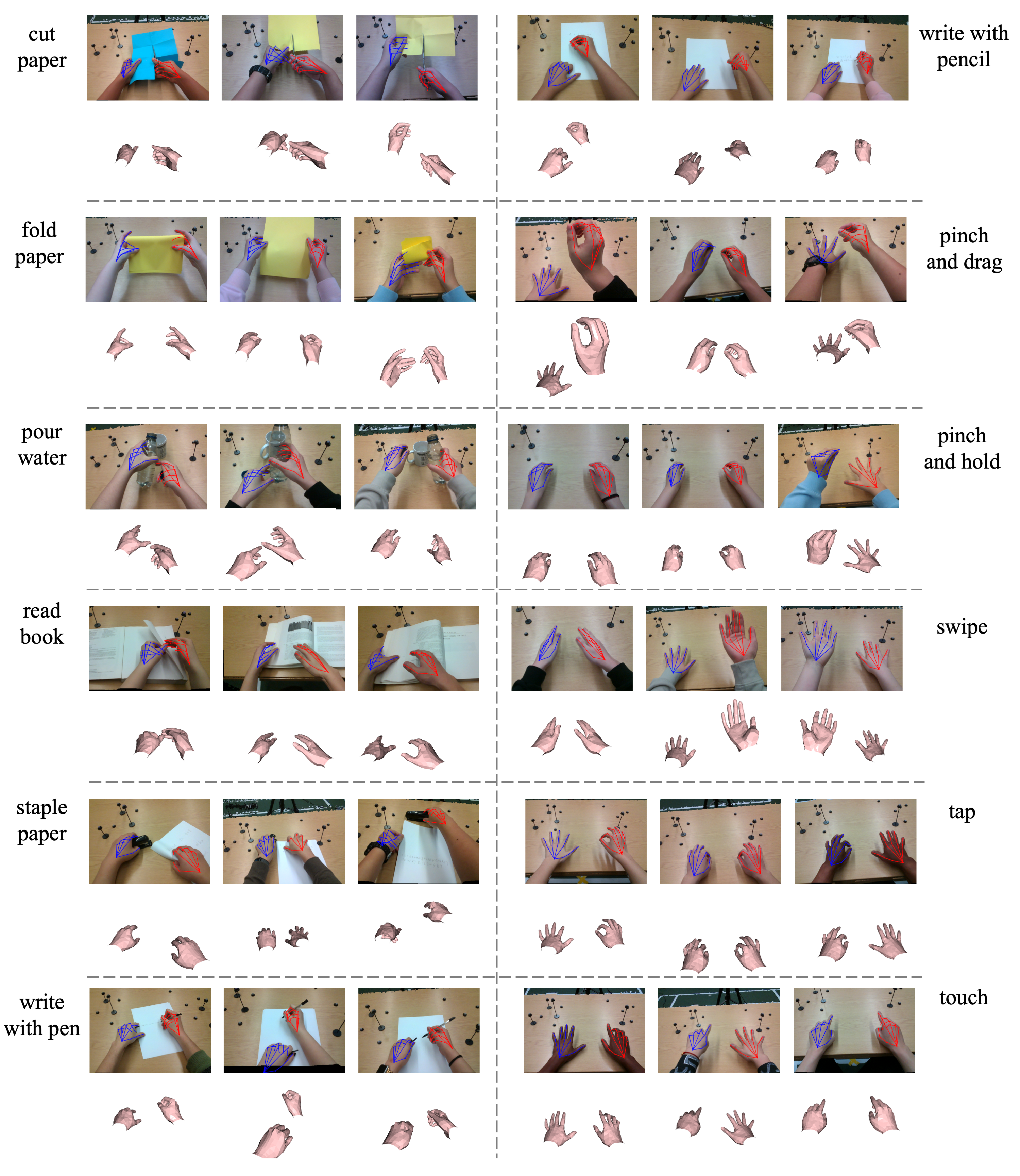
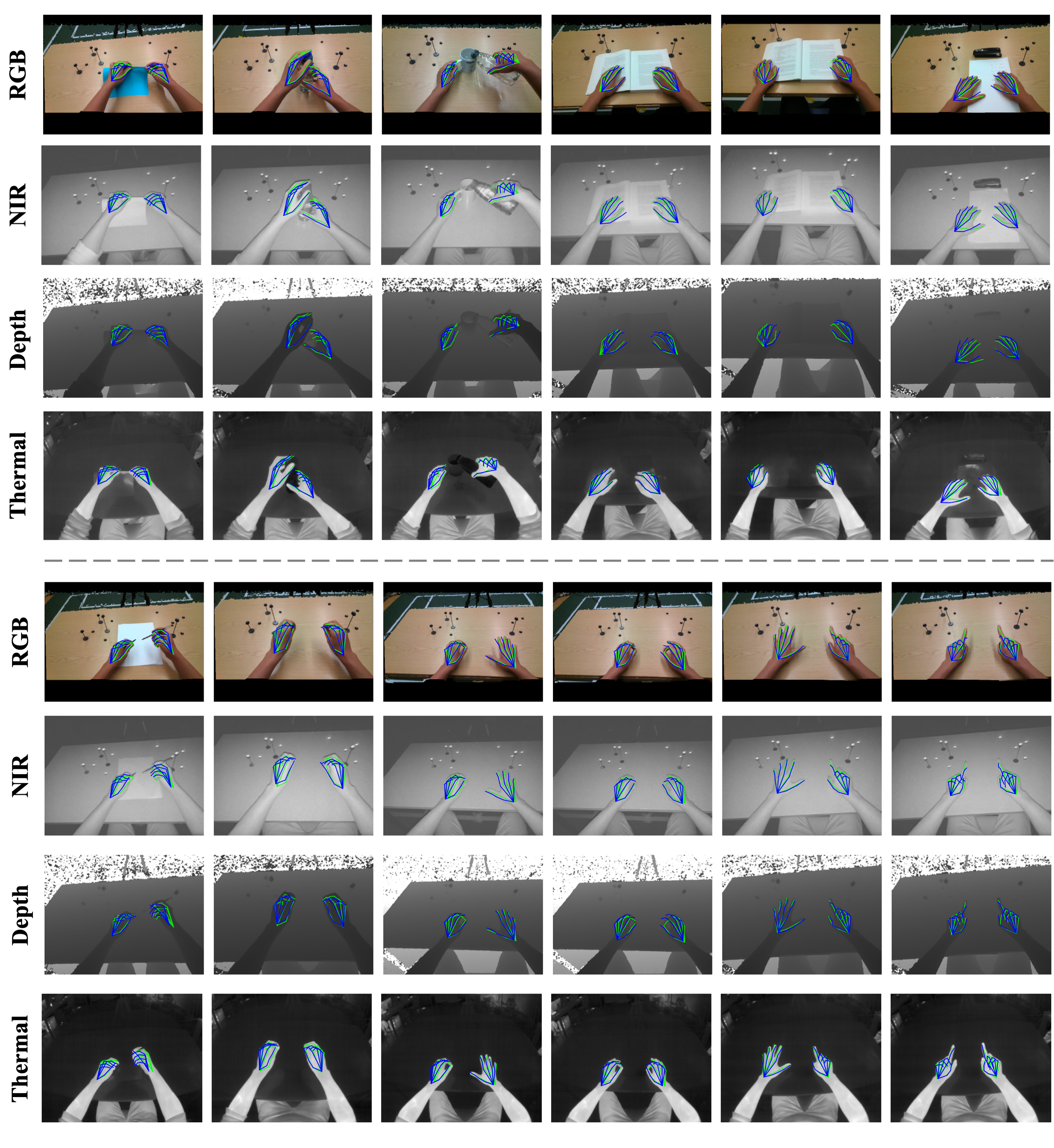
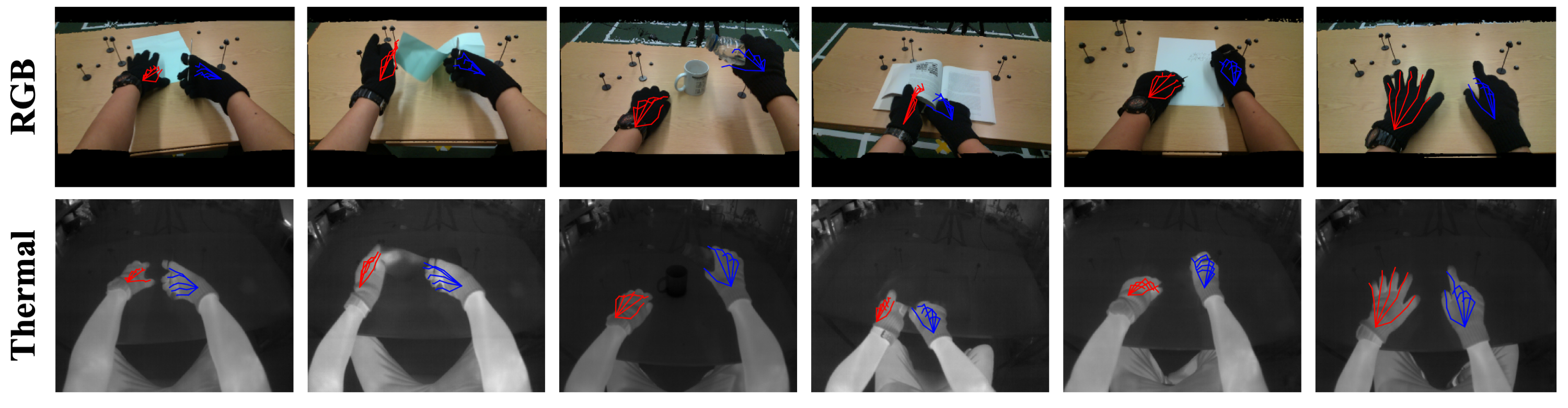
The benchmark includes a multi-view and multi-spectral dataset collected from 28 subjects performing
hand-object and hand-virtual interactions under diverse scenarios, accurately annotated with 3D hand
poses through an automated process. We introduce a new baseline method, TherFormer, utilizing dual
transformer modules for effective egocentric 3D hand pose estimation in thermal imagery.
Our experimental results highlight TherFormer's leading performance and affirm thermal imaging's
effectiveness in enabling robust 3D hand pose estimation in adverse conditions.
 2
2  3
3  4
4